Comprehensive
A comprehensive text covering the fundamentals of robot mechanics.
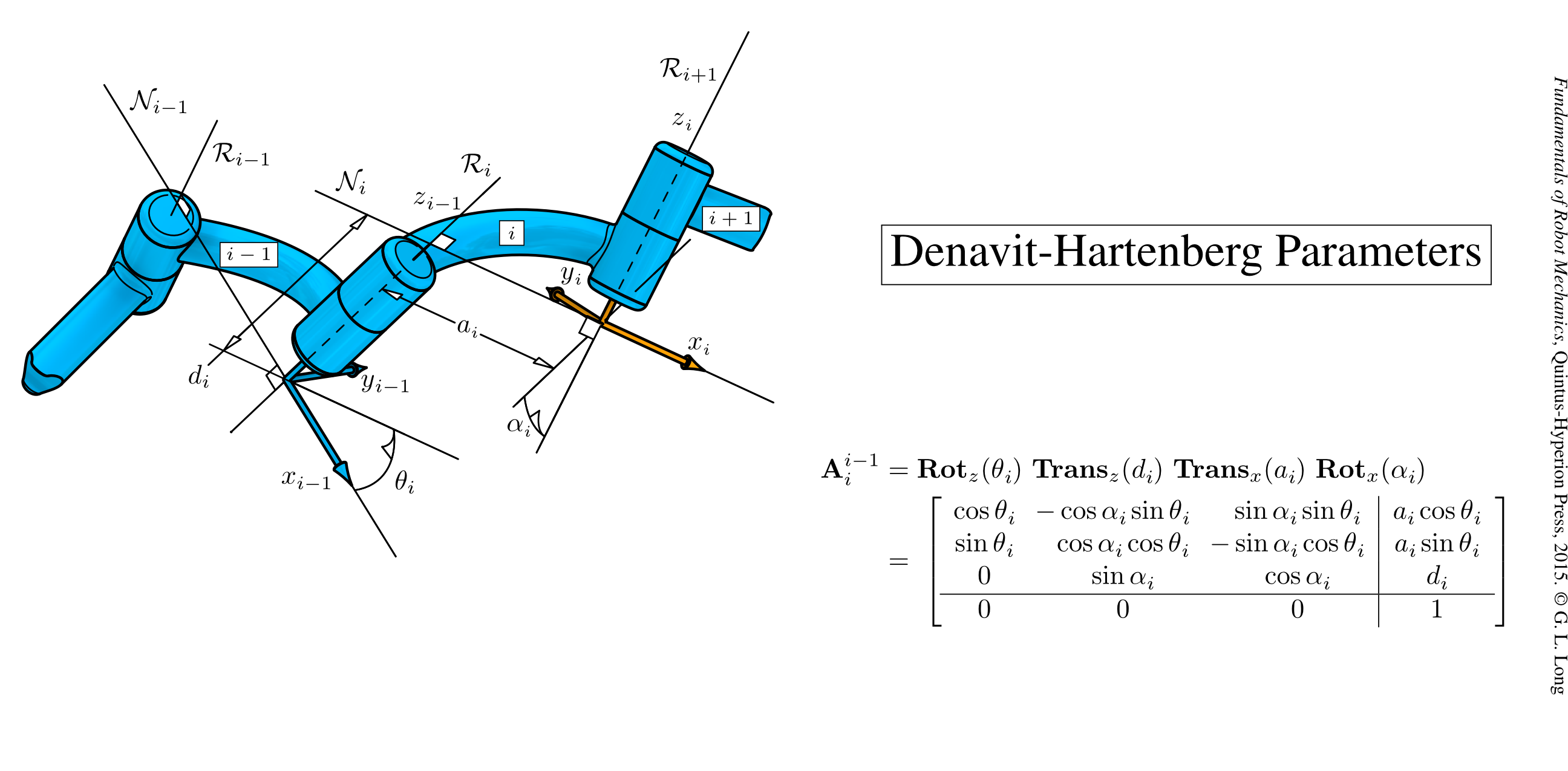
Forward Kinematics
Provides step-by-step instructions for finding the classic DH parameters.
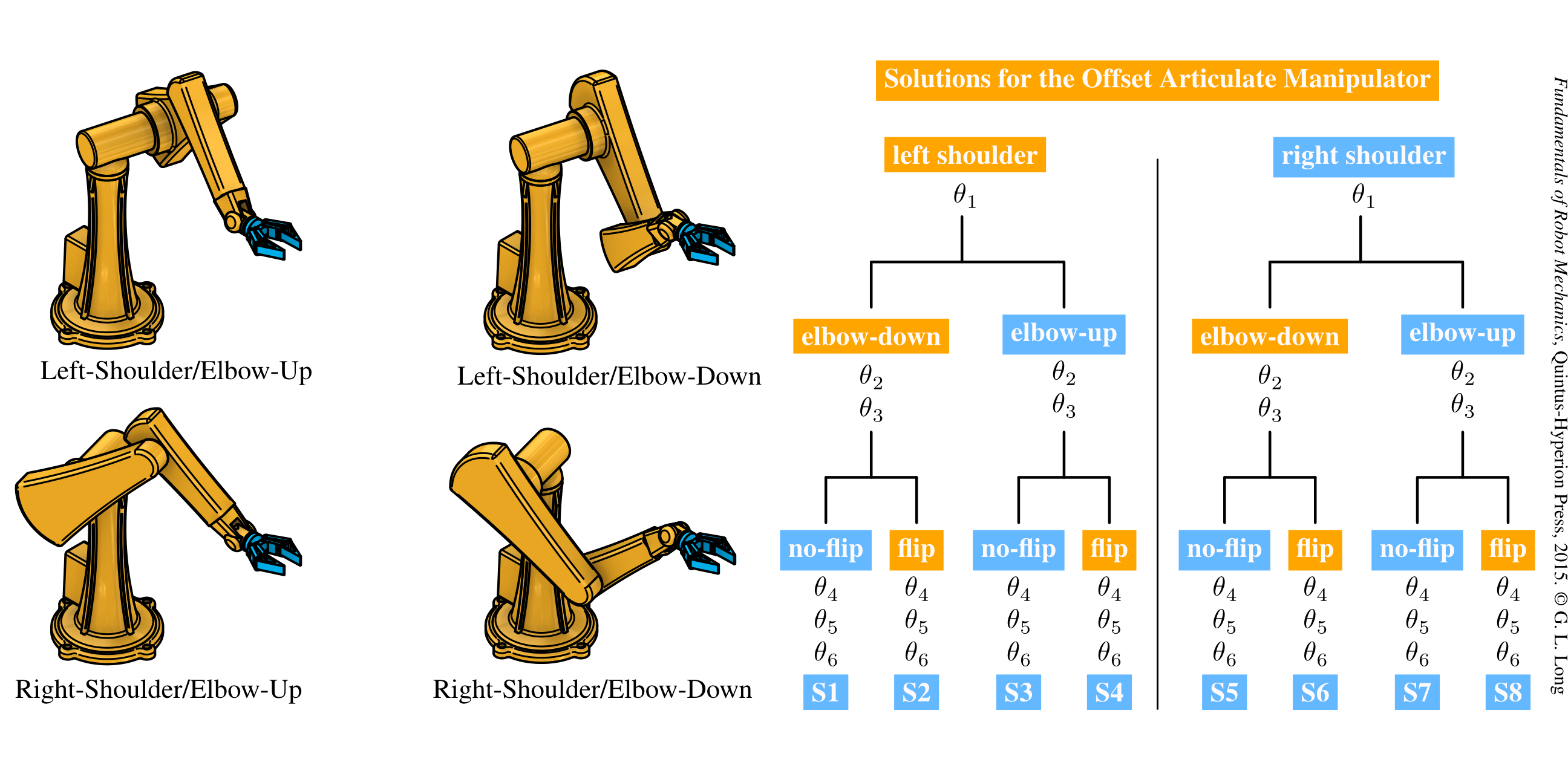
Best Practices in Robot Kinematics
Illustrates a computationally efficient formulation of serial-chain forward and inverse kinematics.
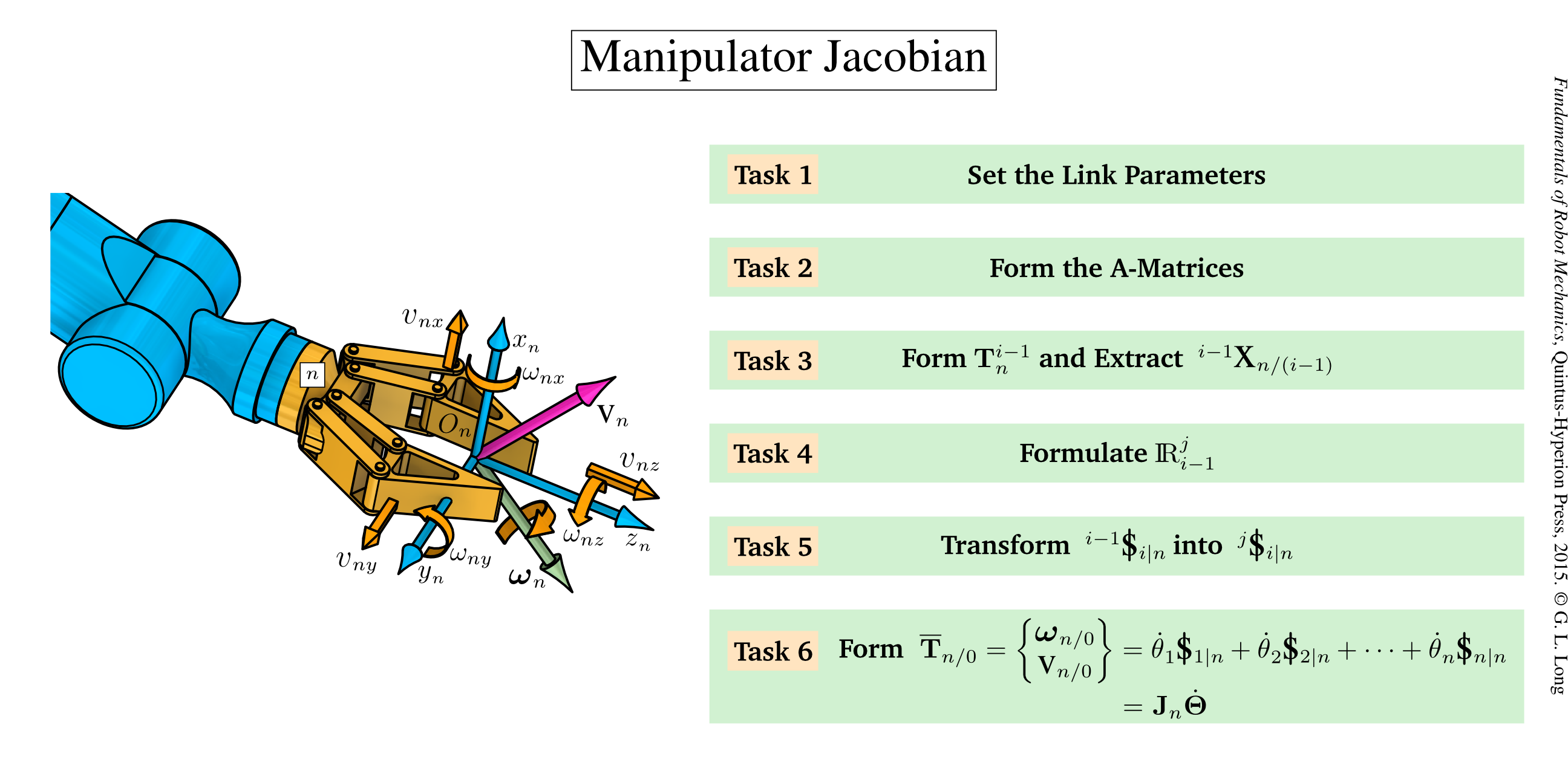
Instantaneous Kinematics
Details an elegant and computationally efficient formulation for the manipulator Jacobian.
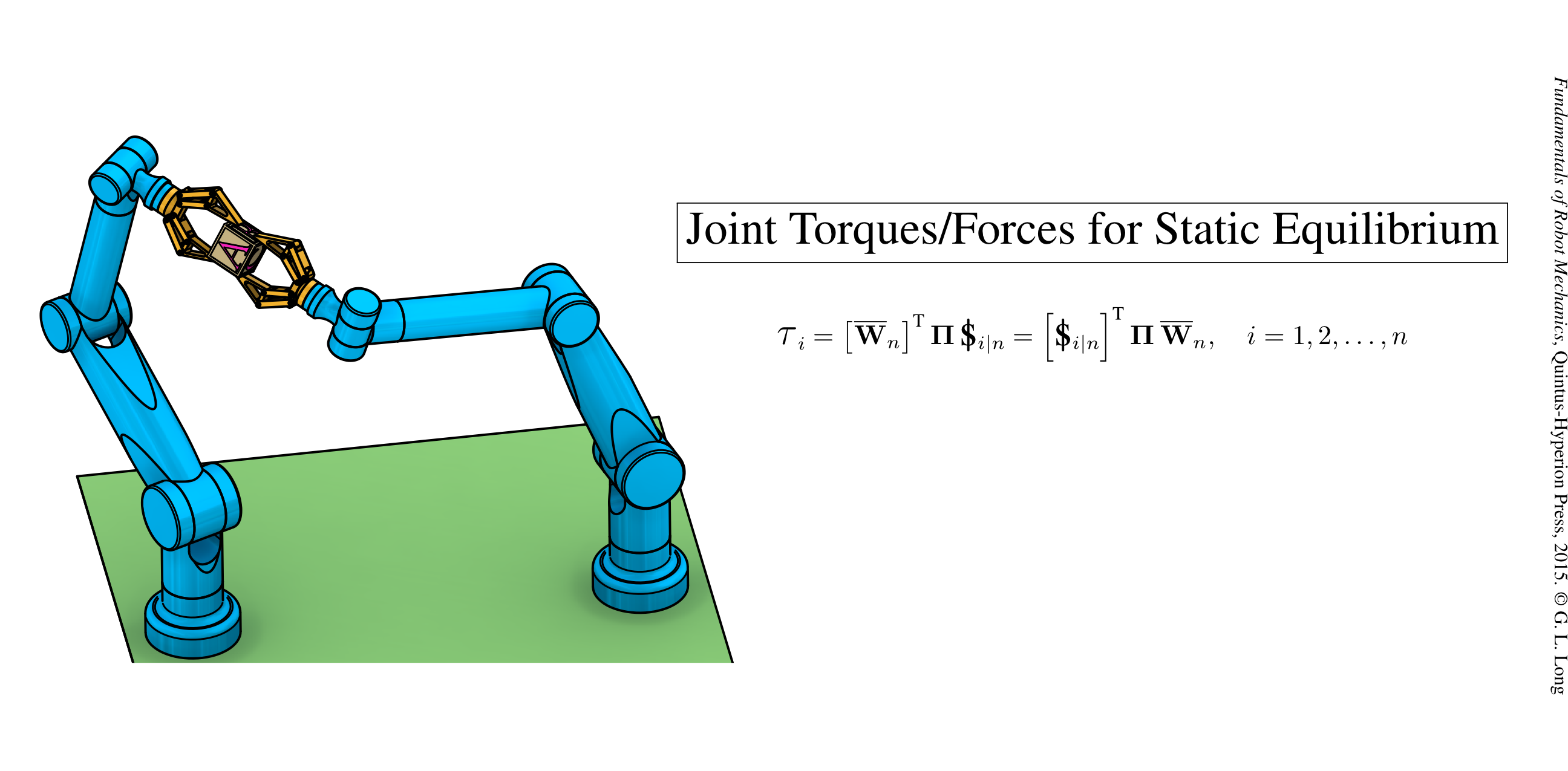
Statics
Gives a concise treatment of statics using virtual work and screw theory.
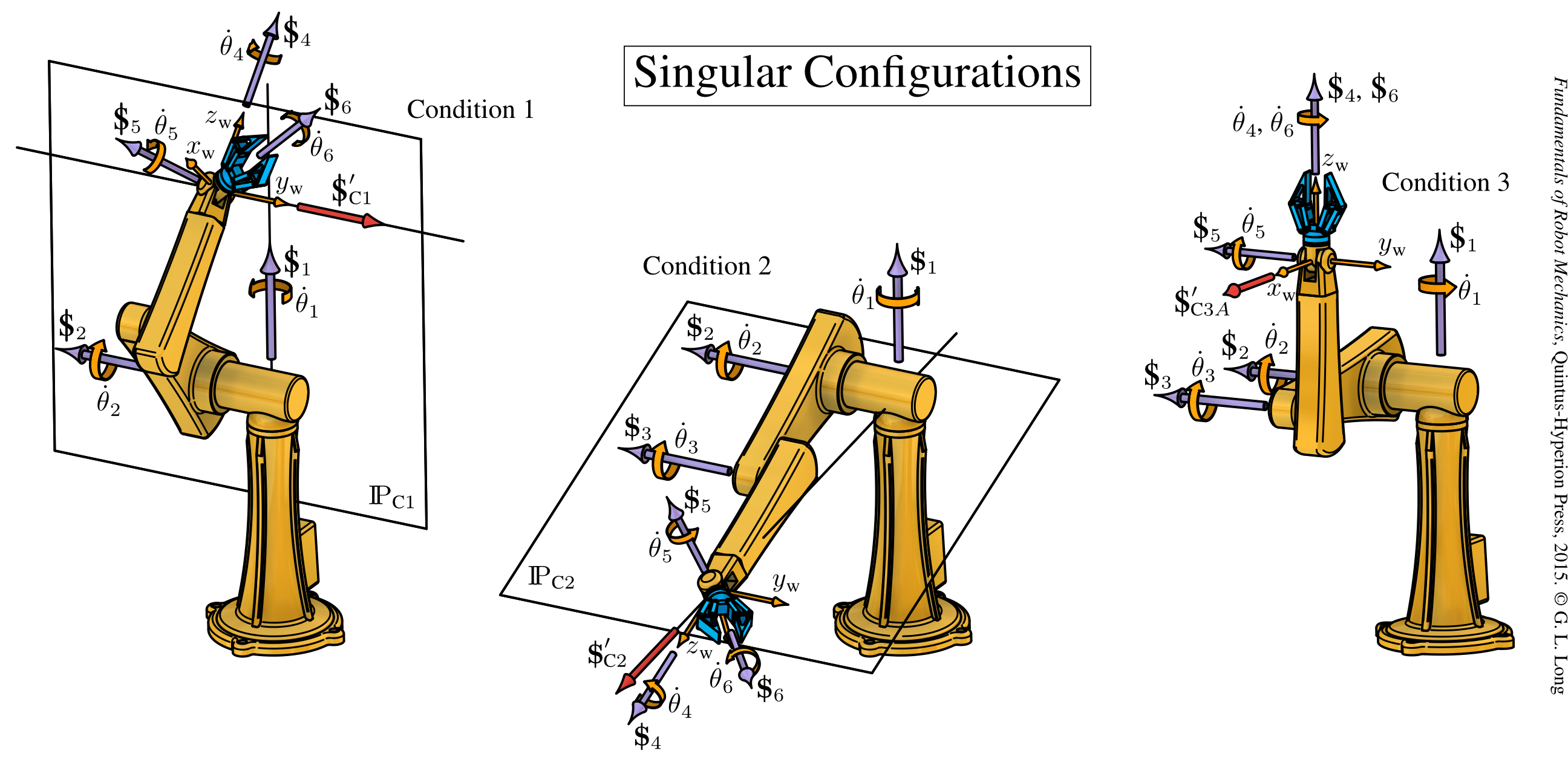
Singularities
Presents a broad treatment of singular configurations.
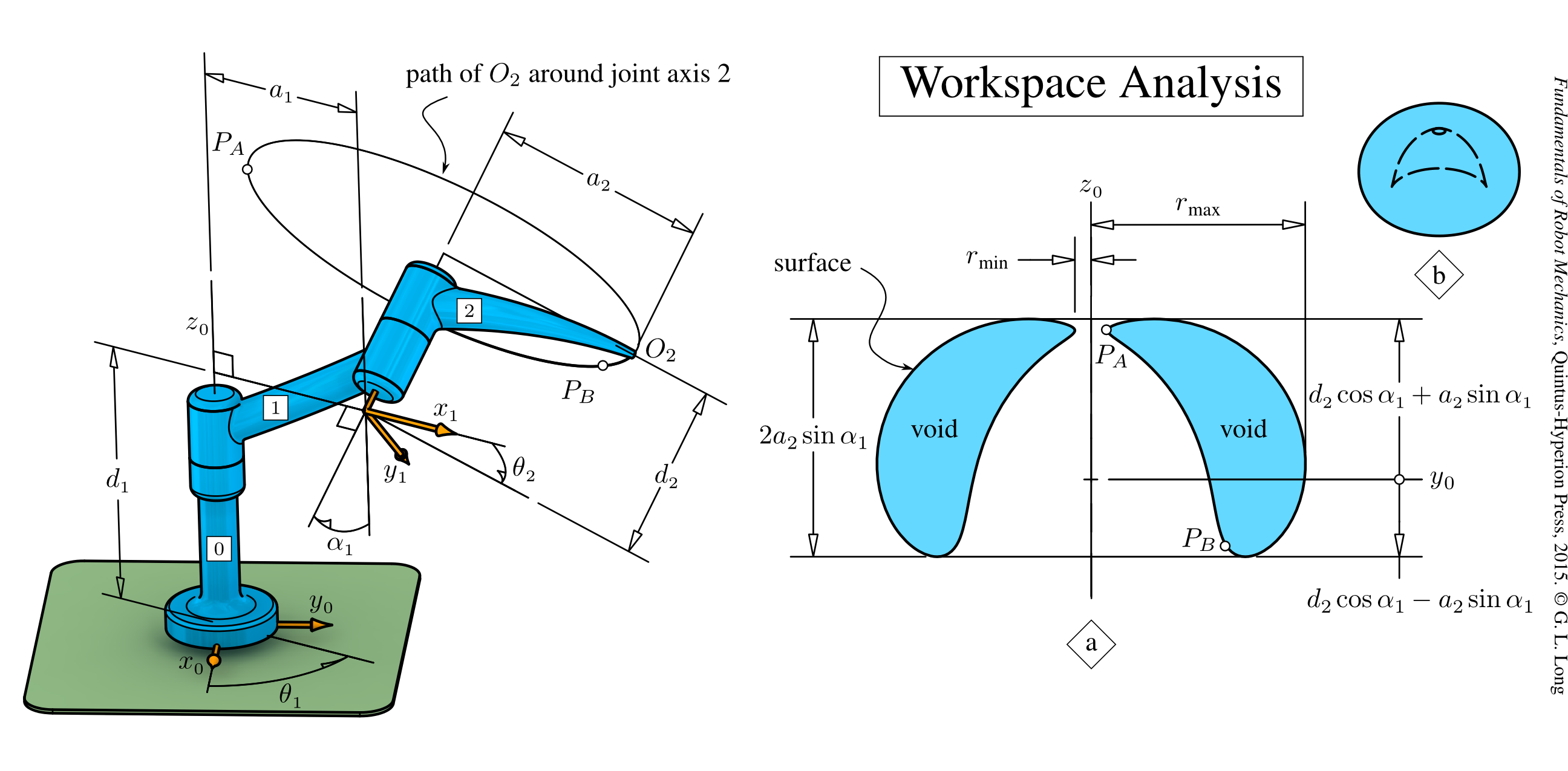
Workspace
Introduces workspace analysis techniques for 2-revolute and 3-revolute joint serial-chain manipulators.
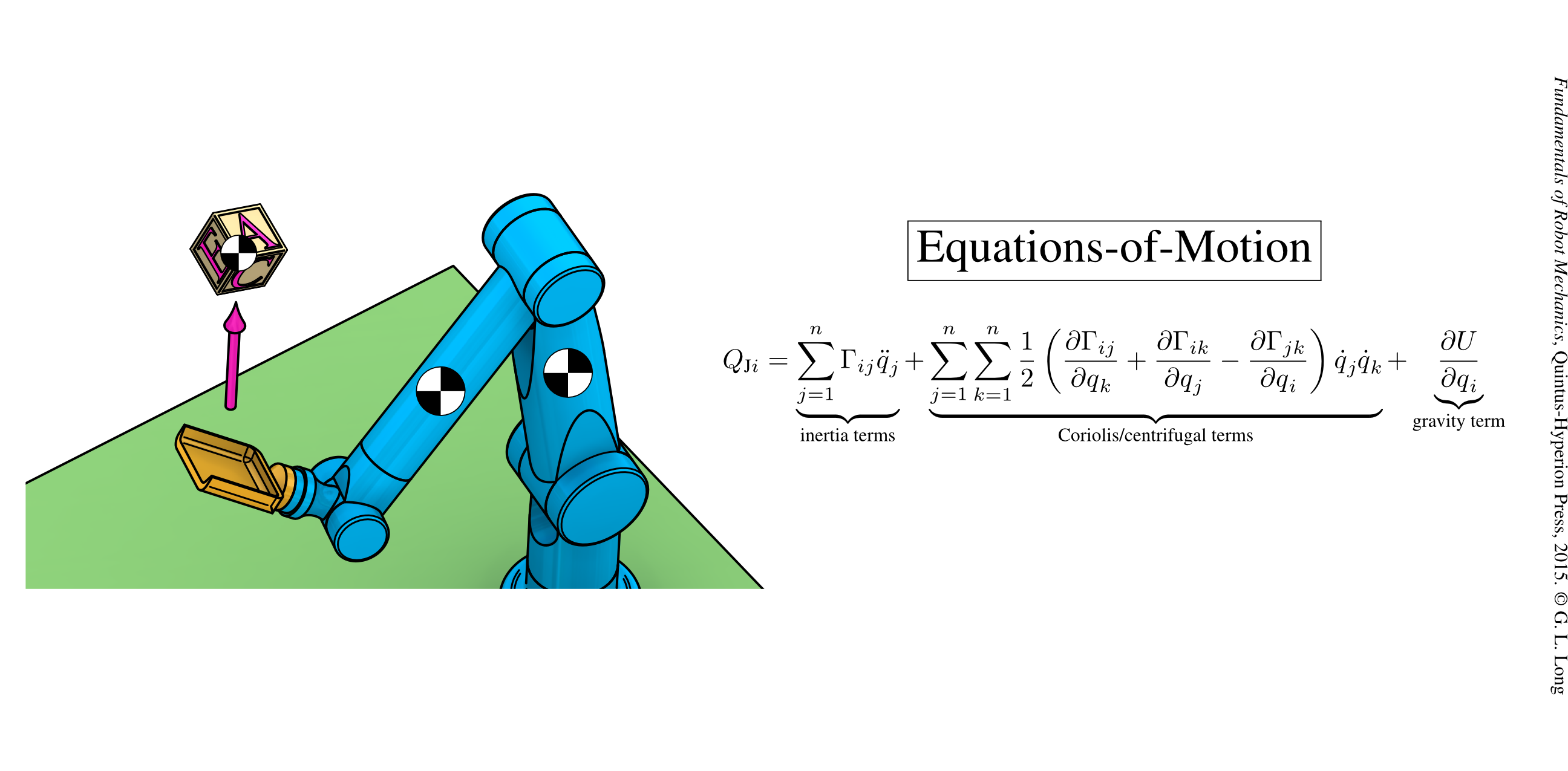
Dynamics
Derives a complete and computationally efficient formulation of manipulator dynamics.

A Great Addition to Any Robotics Collection
Roboticists around the country give it favorable reviews.
Design Guidelines
Summarizes important design guidelines that simplify the equations-of-motion for serial-chain manipulators.
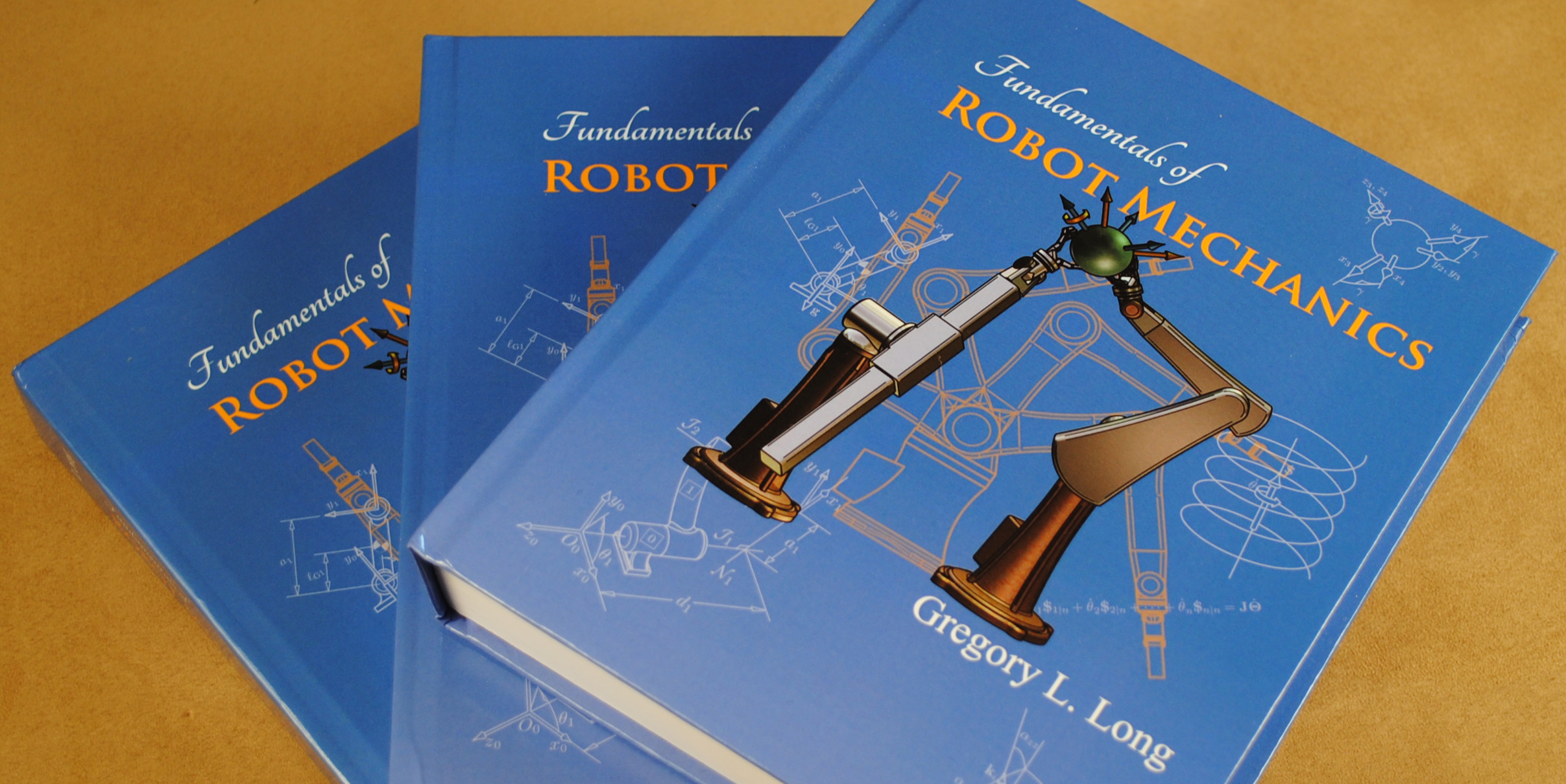
Title: Fundamentals of Robot Mechanics
Author: Gregory L. Long
Binding: Hardcover
Pages: 645
Language: English
Publisher: Quintus-Hyperion Press
Year: 2015
ISBN-13: 978-0-9861094-1-6
Size: 10.25in x 8.25in x 1.75in